图片由AI生成

术中CT

磁导航
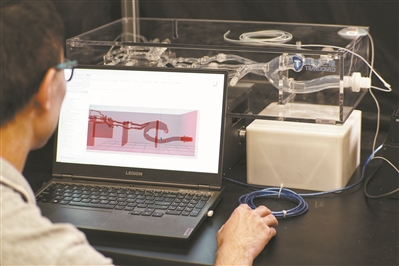
带有微型磁传感器的导管被置入血管模型内,在一旁的电脑屏幕上,探头的位置和姿态便清晰地实时显示出来。

6月6日,广东省人工智能与机器人产业联盟正式宣告成立。如今,机器人不仅可以帮助很多工业企业大幅提高产能,在医疗领域也有很多创新应用。自美国产达芬奇手术机器人在21世纪初开启临床应用以来,手术机器人凭借精准定位、稳定控制、操作灵活等优势,得到越来越广泛的应用。然而,一台进口手术机器人动辄2000多万元的高昂价格,仍让很多医疗机构望而却步。
近年来,广州的科技企业和科研机构在手术机器人核心技术上不断取得重大突破,打破国外垄断,让手术机器人成本大降。其中,华南理工大学吴贤铭智能工程学院王恒教授团队不久前发布了全栈自研的手术机器人电磁定位系统,精度达到国际先进水平,堪称手术机器人领域的“北斗导航”。
手术导航三大技术
光学怕遮挡CT有辐射电磁导航技术突围
手术机器人如何直达病灶?王恒介绍,这就好比我们开车前往一个陌生的目的地,需要准确的地图和导航。患者在术前、术中的医学影像,对机器人来说就是一张三维“地图”,而要准确地前往“目的地”,就需要导航技术为机器人“引路”。在人体内,这些“路”往往是类似肠道、支气管、血管等狭窄的自然腔道,手术机器人从这些腔道前往病灶,并通过一系列精细操作完成手术。这俨然是“螺蛳壳里做道场”,因此,精准的导航系统,对手术机器人尤为关键。
●光学导航、术中CT
目前,手术机器人导航技术主要为光学导航、术中CT、电磁导航等。光学导航比较适合骨科等开放性手术,但受限于视线遮挡,无法用于腔内微创手术。术中CT适用于腔内手术导航,但存在辐射危害、无法实时三维定位等劣势。
●磁导航
运用磁导航技术引导手术机器人有诸多优势,不仅不会产生辐射,也不会被遮挡,可对器械腔内精准定位。此外,操作者还可以利用磁驱动技术,对微创手术机器人进行精准操控。
“手术机器人在进入人体的过程中,除了使用传统的机械结构驱动,还可以利用磁力,更灵活地引导机器人末端精密运动。目前,我们课题组把磁定位和磁驱动这两者统称为磁导航。”王恒介绍。
电磁定位系统应用场景
●经皮穿刺手术
微型磁传感器可以安放在针头上,通过磁导航引导相关器械精准地穿刺到肿瘤等病灶,既可以获取组织进行活检,也可以对病灶进行精准治疗。
●腔内微创手术
包括各种经自然腔道内镜手术(支气管、胆管和泌尿系统等)和血管介入手术。在磁定位系统的引导下,医生可以更直观地了解组织和器械之间的空间位姿关系,进而操控柔性器械灵活精准地通过复杂迂曲的腔道,到达目标工作位置并开展治疗。
●骨科手术
在髓内钉植入手术中,因髓内钉在植入过程中不可视,难以判断末端锁孔位置。借助磁定位系统,可以辅助瞄准髓内钉锁孔,精准完成髓内钉锁定操作。
●手术训练
电磁导航系统可用于各类医疗操作的教学训练和医疗机器人领域的科学研究。目前,医学生已开始使用VR+AR技术进行手术训练,将微型磁传感器装到相应的医疗器械上,通过磁定位和配准,可以沟通虚拟和现实空间,辅助医学生完成沉浸式手术训练。在具身智能领域,电磁定位技术也可以精准记录人类操作的动作数据,助力机器人学习技能。
电磁定位系统工作原理
磁场发射源
王恒介绍,团队自研的电磁定位系统主要由四部分组成。其中,磁场发射源能为定位跟踪提供稳定的磁场分布。记者看到,该发射源非常小巧,为20cm×20cm×10cm的长方体,可灵活放置在手术室内。王恒说:“我们自主研发了主动定位技术,可以把磁场自主投射到目标区域。同时,我们使用的磁源数量比较少,可以减少功耗,这方面我们比国外的产品做得更好。”
微型磁传感器
微型磁传感器主要安装在手术机器人的末端执行器上,主要作用是检测磁场强度和方向,并将其转换为电信号,通过位姿解算精准实现手术机器人的定位追踪。
系统控制单元
传感器单元的数据信号传递到系统控制单元内之后,通过王恒团队自研的位姿估计算法,可以实现高精度、高实时的定位追踪。
系统控制单元可以外接电脑屏幕,医生能通过显示软件准确看到微型磁传感器所在位置。“我们不仅能看到手术机器人所在的位置,还能得知机器人的姿态,这对手术机器人操控提供了重要的基础位姿信息,有利于提升手术机器人系统的自动化和智能化水平。”
传感器单元
微型磁传感器传输电信号给传感器单元时,由于这些电信号比较微弱,存在“噪声”,传感器单元会将这些信号进行放大,并去除“噪声”,将微弱磁场信号转化为定位所需的高质量信号。
本土手术机器人功力大增
灵巧手剥葡萄皮不是问题
在顶级医疗资源富集的广州,手术机器人早已在多家医院上岗,帮助医生更好地完成手术。
与传统微创技术相比,机器人手术具有多方面优势。在精确性方面,手术视野放大倍数可以达到10倍以上,能为主刀医生呈现患者体腔内三维立体高清影像,连极细小的血管也能一目了然。手术器械还可以模拟人手腕的灵活操作,滤除不必要的颤动。在灵活性方面,机器人能在人手不能触及的狭小空间精准操作,突破了人手的局限性。在安全性方面,机器人有实时监控系统保证了手术的安全,杜绝误操作的发生,同时避免了主刀医生与病人的直接接触,可减少手术医生的感染风险。
早在2015年,华南地区首台达芬奇外科手术机器人在中山大学附属第一医院正式投入使用,标志着华南地区的外科手术正式跨入“机器人时代”。
如今,随着通信技术的发展,医生已可在千里之外利用5G通信+手术机器人完成手术治疗。广东本地生产的手术机器人“医术”已大大提高。近日,广东省科技厅党组成员、副厅长杨军向记者展示了广东本土生产的精锋医疗手术机器人。在工作人员的操作下,机器人的灵巧手成功将葡萄皮剥了下来,内部晶莹剔透的果肉完好无损。
从切除肿瘤到膝关节置换
机器人“军团”加速布局
除了王恒的电磁导航系统攻关,广州其他科研机构和科技企业也正在手术机器人领域加速布局。
5月22日,香港中文大学与广州巧捷力医疗科技有限公司于香港联合举办新闻发布会,正式公布使用巧捷力全柔性双臂内镜手术机器人系统进行全球首个机器人辅助经尿道膀胱肿瘤整块切除术(ERBT),至今已成功为8名患者切除整块膀胱肿瘤。初步研究数据显示,利用机器人辅助ERBT,肿瘤切割面非常精准,比传统手术仪器更容易完成肿瘤整块切除,也可减少膀胱壁穿破,提高手术的安全性。
近年来,同样由华南理工大学科研人员创办的广州艾目易科技有限公司成功研制出AimPosition光学定位系统和MAGPILOT电磁定位系统。公司已与上海微创医疗机器人(集团)股份有限公司、威高集团有限公司等国内手术机器人相关厂商合作,孵化了牙种植手术机器人、膝关节置换手术机器人、交叉韧带重建手术机器人、神经外科手术导航系统等。目前,公司和华南理工大学共建手术机器人联合实验室,共同组建科研团队在手术机器人关键技术研究方面深化合作,持续探索更多的前沿领域和应用场景,共同推进手术机器人技术创新发展和产业化应用研究。
大院大所谈创新
深耕智慧医疗领域构建前沿技术策源地
谈到电磁导航技术的成果转化,王恒透露,团队已发布商用电磁定位系统MagTrack,将于近期成立企业,促进该产品的应用和推广。“国外的电磁导航系统产品一套要20多万元,我们希望国产化以后价格降低一半左右。”此外,团队已和中国科学院自动化研究所、深圳市人工智能与机器人研究院、清华大学附属北京清华长庚医院等国内多家科研院所达成合作意向,并在多款医疗机器人预研产品上进行试用。“我们会通过科研合作,拓展电磁定位导航系统的应用,共同开发下游的创新医疗器械。”
除了电磁导航技术,王恒团队正在开展科研攻关的项目还有软磁定位技术和基于磁性橡胶的柔性机器人形状感知技术等。其中,基于磁性橡胶的柔性机器人形状感知系统是一种创新的连续体机器人形状感知解决方案,该技术可以精确感知各类柔性医疗机器人或柔性器械的空间三维形状,为医生提供可视化引导,进一步提升微创手术的精准度和安全性。
王恒教授团队的创新探索,正是吴贤铭智能工程学院深耕智慧医疗领域、构建前沿技术策源地的生动缩影。该学院积极响应中国制造业升级与大湾区发展机遇,以“机器人+”为核心战略,打造“156+X”特色交叉学科群,致力于在多个工业场景实现具身智能机器人的突破与落地。
为系统推进智慧医疗科技创新,学院主导建设的华南理工大学“人工智能与智能制造”学科平台布局“智慧医疗与辅助装备研究中心”,汇聚优势力量进行关键技术攻关。同时,学院积极拓展国际合作,携手新西兰坎特伯雷大学共建“华南理工大学—坎特伯雷大学智慧医疗自动化国际合作实验室(SMART)”,扩展国际前沿视野。
此外,学院还建设了广东省智能与康复装备工程技术研究中心、人工智能医疗器械技术监管科学重点实验室、广州市高端医疗器械概念验证中心等三个智慧医疗方向的省部级科研平台,形成了覆盖基础研究、技术开发、成果转化、监管支撑的全链条智慧医疗创新生态。




《中国城市报》社有限公司版权所有,未经书面授权禁止使用
Copyright © 2015-2025 by www.zgcsb.com. all rights reserved